Game
-
namespace Game
This namespace contains the definitions for classes related to games.
-
class EPEC : public Game::AbstractGame<Data::EPEC::DataObject>
- #include <epec.h>
Class to handle a Nash game between leaders of Stackelberg games.
Subclassed by Models::EPEC::EPEC
Public Functions
-
inline EPEC(GRBEnv *env)
The standard constructor. Initialize an empty instance.
- Parameters
env – The Gurobi environment pointer.
-
void finalize()
Finalizes the creation of a Game::EPEC object.
Performs a bunch of job after all data for a Game::EPEC object are given, namely. Models::EPEC::computeLeaderLocations - Adds the required dummy variables to each leader’s problem so that a game among the leaders can be defined. Calls Game::EPEC::addDummyLead
Makes the market clearing constraint in each country. Calls
-
virtual void findNashEq() override
Computes Nash equilibrium using the Algorithm set in Game::EPEC::Algorithm. Checks the value of Game::EPEC::Algorithm and delegates the task to appropriate Algorithm wrappers.
-
virtual bool isSolved(double tol = 1e-5) const override
Call the delegated Algorithm method and return true if there exist a feasible equilibrium.
- Parameters
tol – A numerical tolerance
- Returns
True if the incumbent solution is an equilibrium
-
virtual bool isPureStrategy(double tol = 1e-5) const override
Call the delegated Algorithm method and return true if the equilibrium is pure.
- Parameters
tol – A numerical tolerance
- Returns
True if the incumbent equilibrium is pure
-
std::unique_ptr<GRBModel> bestResponseProgram(const unsigned int i, const arma::vec &x, MathOpt::PolyLCP *customLCP = nullptr) const
Given a player id
i, the incumbent solutionx(and optionally a custom player LCPcustomLCP), this method returns the model corresponding to the best response ofigiven the other players’ decisions inx.- Parameters
i – The player id
x – The incumbent solution
customLCP – An optional parameter with a custom LCP
- Returns
A pointer to the (solved) Gurobi model for the best response
-
double bestResponse(arma::vec &sol, unsigned int player, const arma::vec &x, const arma::vec &prevDev = {}, MathOpt::PolyLCP *customLCP = nullptr) const
Returns the best-response value for the player
playergiven the decisionxof all other players.Calls Game::EPEC::respond and obtains the std::unique_ptr to GRBModel of best response by player
player. Then solves the model and returns the appropriate objective value.- Parameters
sol – The optimal response for
playerplayer – The player id
x – The solution vector
prevDev – An optional previous deviation encountered. This is useful to normalize any unbounded best response
customLCP – An optional pointer to a custom player LCP.
- Returns
The optimal objective value for the player
player.
-
inline const arma::vec getX() const
Getter for the incumbent solution (x)
- Returns
The incumbent x
-
inline const arma::vec getZ() const
Getter for the incumbent solution (z)
- Returns
The incumbent z
-
void setAlgorithm(Data::EPEC::Algorithms algorithm)
Decides the Algorithm to be used for solving the given instance of the problem. The choice of algorithms are documented in Game::EPECalgorithm.
- Parameters
algorithm – The input algorithm
-
void setRecoverStrategy(Data::EPEC::RecoverStrategy strategy)
Decides the Algorithm to be used for recovering a PNE out of the InnerApproximation procedure.
- Parameters
strategy – Input ecovery strategy
-
void setBranchingStrategy(Data::EPEC::BranchingStrategy strategy)
Sets the branching strategy for the CutAndPlay.
- Parameters
strategy – The input strategy
-
inline void setAggressiveness(unsigned int a)
-
inline void setAddPolyMethod(Data::LCP::PolyhedraStrategy add)
Set the Data::LCP::PolyhedraStrategy for the inner approximation.
-
unsigned int getPositionLeadFoll(unsigned int i, unsigned int j) const
Gets the position of the j-th variable in the i-th leader Querying Game::EPEC::LCPModel for x[return-value] variable gives the appropriate variable.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
unsigned int getPositionLeadLead(unsigned int i, unsigned int j) const
Gets the position of the j-th Follower variable in the i-th leader Querying Game::EPEC::LCPModel for x[return-value] variable gives the appropriate variable.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
double getValLeadFoll(unsigned int i, unsigned int j) const
Gets the value of the j-th variable in i-th leader.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
double getValLeadLead(unsigned int i, unsigned int j) const
Gets the value of the j-th non-follower variable in i-th leader.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
double getValProbab(unsigned int i, unsigned int k)
Returns the probability associated with the k -th polyhedron of the i -th leader.
- Parameters
i – Leader index
k – The polyhedron index
- Returns
The queried attribute
-
double getValLeadFollPoly(unsigned int i, unsigned int j, unsigned int k, double tol = 1e-5) const
For the
i-th leader, gets thek-th pure strategy at positionj.- Parameters
i – The leader index
j – The position index
k – The pure strategy index
tol – A numerical tolerance
- Returns
The queried attribute
-
double getValLeadLeadPoly(unsigned int i, unsigned int j, unsigned int k, double tol = 1e-5) const
For the
i-th leader, gets thek-th pure strategy at leader positionj.- Parameters
i – The leader index
j – The position index
k – The pure strategy index
tol – A numerical tolerance
- Returns
The queried attribute
-
std::vector<unsigned int> mixedStrategyPoly(unsigned int i, double tol = 1e-5) const
Returns the indices of polyhedra feasible for the leader, from which strategies are played with probability greater than the tolerance.
- Parameters
i – Leader index
tol – Tolerance
- Returns
The queried attribute
-
inline const MathOpt::LCP &getLCPDescription() const
Get the Game::LCP object solved in the last iteration either to solve the problem or to prove non-existence of Nash equilibrium. Object is returned using constant reference.
-
inline const GRBModel &getLCPModel() const
Get the GRBModel solved in the last iteration to solve the problem or to prove non-existence of Nash equilibrium. Object is returned using constant reference.
-
inline void writeLCPModel(const std::string &filename) const
Writes the GRBModel solved in the last iteration to solve the problem or to prove non-existence of Nash equilibrium to a file.
-
void getXWithoutHull(const arma::vec &x, arma::vec &xWithoutHull) const
Given the the solution
x, the method returns inxWithoutHullthe x vector without the convex-hull’s variables. Also, no MC variables are included.- Parameters
x – The EPEC’s solution
xWithoutHull – The output solution without convex hull variables
-
void getXofI(const arma::vec &x, const unsigned int &i, arma::vec &xOfI, bool hull = false) const
Given the player id
iand the solutionx, the method returns inxWithoutHullthe x vector for the given player, with the convex-hull’s variables in casehullis false. Also, no MC variables are included.- Parameters
x – The EPEC’s solution
i – The player id
xOfI – Output solution vector for i
hull – True if convex-hull variables need to be included in the output
-
void setWelfareObjective(bool linear, bool quadratic)
Given the object Game::EPEC::LCPModel, this method sets its objective to the social welfare. In specific, we can decide whether to include or not the linear or quadratic part of the welfare
- Parameters
linear – True if the linear part is to be included, false otherwise.
quadratic – True if the quadratic part is to be included, false otherwise.
Protected Functions
-
bool warmstart(const arma::vec &x)
Warmstarts EPEC with a solution.
Warmstart the solution with
x.- Todo:
Complete this implementation
- Parameters
x – The warmstart solution
- Returns
True if the warmstart was successful
-
virtual void makeObjectivePlayer(const unsigned int i, MathOpt::QP_Objective &QP_obj) = 0
Empty function - optionally re-implementable in derived class.
- Parameters
i – The player id
QP_obj – The QP_object with the objective
-
virtual void preFinalize() = 0
Empty function - optionally re-implementable in derived class.
This function can be optionally implemented by the derived class. Code in this class will be run before calling Game::EPEC::finalize().
-
virtual void postFinalize() = 0
Empty function - optionally re-implementable in derived class.
This function can be optionally implemented by the derived class. Code in this class will be run after calling Game::EPEC::finalize().
-
virtual void updateLocations() = 0
Empty function - optionally re-implementable in derived class.
If any location tracking system is implemented, that can be called from in here.
-
inline virtual void makeMCConstraints(arma::sp_mat &MC, arma::vec &RHS) const
Empty function - optionally re-implementable in derived class.
Builds the Market Clearing constraints
- Parameters
MC – MC constraints matrix
RHS – RHS for the constraints
Protected Attributes
-
std::vector<std::shared_ptr<Game::NashGame>> PlayersLowerLevels = {}
The lower level Nash Games among the followers.
-
std::vector<std::shared_ptr<MathOpt::LCP>> PlayersLCP = {}
The LCP of each leader, encompassing both Stackelberg and low-level Nash games.
-
std::vector<std::shared_ptr<MathOpt::QP_Objective>> LeaderObjective = {}
Objective of each leader.
-
std::vector<std::shared_ptr<MathOpt::QP_Objective>> LeaderObjectiveConvexHull = {}
Objective of each leader, given the convex hull computation.
-
std::vector<unsigned int> LeaderLocations = {}
Location of each leader Number of variables in the current player, including any number of convex hull variables at the current moment. The used, i.e., the inheritor of Game::EPEC has the responsibility to keep this correct by implementing an override of Game::EPEC::updateLocations.
-
std::vector<const unsigned int*> LocEnds = {}
The ending locations for the leaders’ variables.
-
std::vector<unsigned int> ConvexHullVariables = {}
Number of convex hull variables for each leader.
-
unsigned int numMCVariables = {0}
Number of market clearning variables.
-
bool Finalized = {false}
A flag controlling if the EPEC was finalized.
-
arma::vec SolutionZ
Solution equation values.
-
arma::vec SolutionX
Solution variable values.
Private Functions
-
void addDummyLead(unsigned int i)
Add Dummy variables for the leaders.
Adds dummy variables to the leader of an EPEC - useful after computing the convex hull.
- Parameters
i – The leader id to whom dummy variables should be added
-
void makePlayerQP(unsigned int i)
Makes the MathOpt::QP_Param corresponding to the
i-thcountry.First gets the Game::LCP object from
Game::EPEC::PlayersLowerLevelsand makes a MathOpt::QP_Param with this LCP as the lower levelThis is achieved by calling LCP::makeQP and using the objective value object in
Game::EPEC::LeaderObjectiveFinally the locations are updated owing to the complete convex hull calculated during the call to LCP::makeQP
Note
Overloaded as Models::EPEC::makePlayerQP()
- Parameters
i – The player’s id
-
void makePlayersQPs()
Makes the MathOpt::QP_Param for all the countries. Calls are made to Models::EPEC::makePlayerQP(const unsigned int i) for each valid player id.
-
void makeTheLCP()
Formulates the LCP to compute an equilibrium. In this LCP, each player’s feasible region is given by the PlayersQP associated entry. If the QP stems from a full enumeration, for instance, the solution will be exact.
-
void computeLeaderLocations(unsigned int addSpaceForMC = 0)
Assigns the values to LeaderLocations to each player.
- Parameters
addSpaceForMC – contains the number of Market Clearing variables
-
void getXMinusI(const arma::vec &x, const unsigned int &i, arma::vec &xMinusI) const
Given a solution in
x, computes the other players’ solution x minusiinxMinusI.- Parameters
x – The incumbent solution
i – The player id
xMinusI – The output strategy
-
bool computeNashEq(bool pureNE, double localTimeLimit, bool check, bool linearWelfare, bool quadraticWelfare)
Given that Game::EPEC::PlayersQP are all filled with a each country’s MathOpt::QP_Param problem (either exact or approximate), computes the Nash equilibrium.
pureNEchecks for pure Nash Equilibrium. It does not work with EPEC::Algorithms::CutAndPlaylocalTimeLimitsets the timelimit for the solver. a negative value is infinite timecheckIf true, the method calls the isSolved() method related to the active algorithm EPEC::AlgorithmslinearWelfareIf true, the objective of the resulting LCP includes the sum of the linear objectives for the playersquadraticWelfareIf true, the objective of the resulting LCP includes the sum of the quadratic objectives for the players- Returns
true if a Nash equilibrium is found
Private Members
-
std::shared_ptr<Algorithms::EPEC::PolyBase> Algorithm = {}
The incumbent algorithm used to solve the instance.
-
std::vector<unsigned int> SizesWithoutHull = {}
Size of leaders’ variables without the convex hull variables.
-
std::unique_ptr<GRBModel> LCPModel
A Gurobi mode object of the LCP form of EPEC.
-
std::unique_ptr<GRBModel> LCPModelBase
A Gurobi mode object of the LCP form of EPEC. If we are searching for a pure NE, the LCP which is indifferent to pure or mixed NE is stored in this object.
Friends
- friend class Algorithms::EPEC::PolyBase
- friend class Algorithms::EPEC::InnerApproximation
- friend class Algorithms::EPEC::CutAndPlay
- friend class Algorithms::EPEC::CombinatorialPNE
- friend class Algorithms::EPEC::FullEnumeration
-
inline EPEC(GRBEnv *env)
-
template<typename DataObjectType>
class AbstractGame - #include <games.h>
An abstract class for a game.
- Template Parameters
DataObjectType – The object type for the data
class aGame : public AbstractGame<Data::aGame::DataObject>{ public: //Override AbstractGame methods void findNashEq() override; bool isSolved(double tol = 1e-5) const override; bool isPureStrategy(double tol = 1e-5) const override; }
Public Functions
-
inline AbstractGame(GRBEnv *env)
Standard constructor with the Gurobi Environment.
- Parameters
env – A pointer to the Gurobi environment
-
AbstractGame() = default
Default constructor.
-
AbstractGame(AbstractGame&) = delete
Copy constructor. Not active.
-
~AbstractGame() = default
Deconstructor.
-
virtual void findNashEq() = 0
The main method to start the solving process.
-
virtual bool isSolved(double tol = 1e-5) const = 0
Return a bool true if the strategies are all pure, for any player.
-
virtual bool isPureStrategy(double tol = 1e-5) const = 0
Return a bool indicating whether the equilibrium is a pure strategy.
-
inline ZEROStatistics<DataObjectType> getStatistics() const
Getter for statistics.
- Returns
Returns the appropriate Data Object Type
-
inline void setNumThreads(unsigned int t)
Sets the number of threads for Gurobi.
- Parameters
t – The number of threads
-
inline void setRandomSeed(unsigned int t)
Sets the random seed for pseudo-random operations.
- Parameters
t – The seed
-
inline void setPureNashEquilibrium(bool val)
Requires the algorithm to find a pure equilibrium.
Warning
This field may not be used by all the inheritor algorithms.
- Parameters
val – The boolean requirement
-
inline void setDeviationTolerance(double val)
Sets the tolerance for profitable deviations.
- Parameters
val – Deviation tolerance
-
inline void setTimeLimit(double val)
Sets the timelimit.
- Parameters
val – The timelimit
-
inline int getNumVar() const noexcept
Gets the number of variables.
- Returns
The number of variable
-
inline int getNumPlayers() const noexcept
Gets the number of players.
- Returns
The number of players
Protected Attributes
-
std::chrono::high_resolution_clock::time_point InitTime
-
GRBEnv *Env = {}
Store run time information.
The Gurobi environment
-
unsigned int NumVariables = {0}
The number of variables in the game.
-
unsigned int NumPlayers = {0}
The number of players in the game.
-
bool NashEquilibrium = {false}
True if computeNashEq returned an equilibrium. Note that this can be the equilibrium of an approximation, and not to the original game. Refer to isSolved() to get a definitive answer.
-
class IPG : public Game::AbstractGame<Data::IPG::DataObject>
- #include <ipg.h>
This class handles Integer Programming Games (IPG), namely multiple agents solving an integer programming game.
Subclassed by Models::IPG::IPG
Public Functions
-
void finalize()
This methods finalizes the model by disabling any edits to the number of players. The proper object (for instance, the ones counting players variables) are initialized with the right values.
-
inline IPG(GRBEnv *env)
Standard initializer.
- Parameters
env – A pointer to the Gurobi Environment
This constructors initializes the integer programming game with the Gurobi environment
envand the vector of shared pointers to the IP_Params inplayers.- Parameters
env – A pointer to the Gurobi Environment
players – A vector containing the pointers to the IP param for each player
env – Pointer to the Gurobi environment
players – The MathOpt::IP_Param for the players
-
virtual void findNashEq() override
The main method to start the solving process.
-
virtual bool isSolved(double tol = 1e-5) const override
Return a bool true if the strategies are all pure, for any player.
-
virtual bool isPureStrategy(double tol = 1e-5) const override
Return a bool indicating whether the equilibrium is a pure strategy.
-
inline std::vector<arma::vec> getX() const
Gets the X in the incumbent solution.
- Returns
A const vector copy of X.
-
inline double getSocialWelfare() const
-
inline ZEROStatistics<Data::IPG::DataObject> getStatistics() const
Get the EPECStatistics object for the current instance.
-
inline void setAlgorithm(Data::IPG::Algorithms algorithm)
Sets the Data::IPG::Algorithms for the solution process.
- Parameters
algorithm – An enum from Data::IPG::Algorithms
-
inline void setPresolve(bool value)
Sets the Data::IPG::Presolve for the solution process.
- Parameters
value – A boolean for Data::IPG::Presolve
-
inline void setLCPAlgorithm(const Data::LCP::Algorithms algo)
Sets the Data::LCP::Algorithms for the LCP solution process.
- Parameters
algo – An enum from Data::LCP::Algorithms
-
inline void setGameObjective(const Data::IPG::Objectives obj)
Sets the Data::IPG::Objectives for the LCP objective.
- Parameters
obj – An enum from Data::IPG::Objectives
-
inline void setCutsAggressiveness(const Data::IPG::CutsAggressiveness aggressiveness)
Sets the Data::IPG::CutsAggressiveness for the cut aggressiveness in Algorithms::IPG::CutAndPlay.
- Parameters
aggressiveness – An enum from Data::IPG::CutsAggressiveness
Protected Functions
-
virtual void preFinalize() = 0
Virtual (empty) method. Can be implemented by a derived class.
-
virtual void postFinalize() = 0
Virtual (empty) method. Can be implemented by a derived class.
Protected Attributes
-
std::vector<std::shared_ptr<MathOpt::IP_Param>> PlayersIP = {}
The Integer Programs associated to each player.
-
std::vector<unsigned int> PlayerVariables = {}
The number of variables for each player.
-
bool Finalized = {false}
-
std::vector<arma::vec> Solution
Solution variable values, for each player.
-
double SocialWelfare
SocialWelfare associated to the incumbent solution.
Private Members
-
std::shared_ptr<Algorithms::IPG::Algorithm> Algorithm = {}
The Algorithm’s instance.
Friends
- friend class Algorithms::IPG::Algorithm
- friend class Algorithms::IPG::CutAndPlay
- friend class Algorithms::IPG::ZERORegrets
-
void finalize()
-
class NashGame
- #include <nash.h>
Class to model Nash-cournot games with each player playing a QP.
Stores a vector of QPs with each player’s optimization problem. Potentially common (leader) constraints can be stored too.
Helpful in rewriting the Nash-Cournot game as an LCP Helpful in rewriting leader constraints after incorporating dual variables etc
Warning
This has public fields which if accessed and changed can cause undefined behavior!
Public Functions
-
inline explicit NashGame(GRBEnv *e) noexcept
To be used only when NashGame is being loaded from a file.
Constructing a NashGame from a set of MathOpt::MP_Param, Market clearing constraints.
Construct a NashGame by giving a std::vector of pointers to MP_Param, defining each player’s game A set of Market clearing constraints and its RHS And if there are leader variables, the number of leader vars.
Have a std::vector of pointers to MathOpt::MP_Param ready such that the variables are separated in \(x^{i}\) and \(x^{-i}\) format.
In the correct ordering of variables, have the Market clearing equations ready.
Now call this constructor. It will allocate appropriate space for the dual variables for each player.
- Parameters
e – A pointer to the Gurobi Environment
players – The MathOpt::MP_Param associated to the players
MC – Market clearing LHS matrix
MCRHS – Market clearing RHS vector
nLeadVar – Number of leaders’ variables
leadA – Leaders’ constraints
leadRHS – Leaders’ RHSs
-
NashGame(const NashGame &N)
Default copy constructor.
- Parameters
N – The original copy object
-
~NashGame() = default
Default destructor.
-
inline unsigned int getNprimals() const
Read-only access to the number of of primal variables.
-
inline unsigned int getNumShadow() const
Read-only access to the number of Market clearing Shadow prices, equal to the number of Market clearing constraints.
-
inline unsigned int getNumLeaderVars() const
Read-only access to the number of the leader variables in the problem.
-
inline unsigned int getNumDualVars() const
Read-only access to the number of dual variables and that is indeed the sum of the number dual variables for each player.
-
inline unsigned int getPrimalLoc(unsigned int i = 0) const
Read-only access to the primal variable of i th player.
-
inline unsigned int getMCDualLoc() const
Read-only access to the Market-clearing dual variables start position.
-
inline unsigned int getLeaderLoc() const
Read-only access to the leaders’ variables start position.
-
inline unsigned int getDualLoc(unsigned int i = 0) const
Read-only access to the dual variables start position.
-
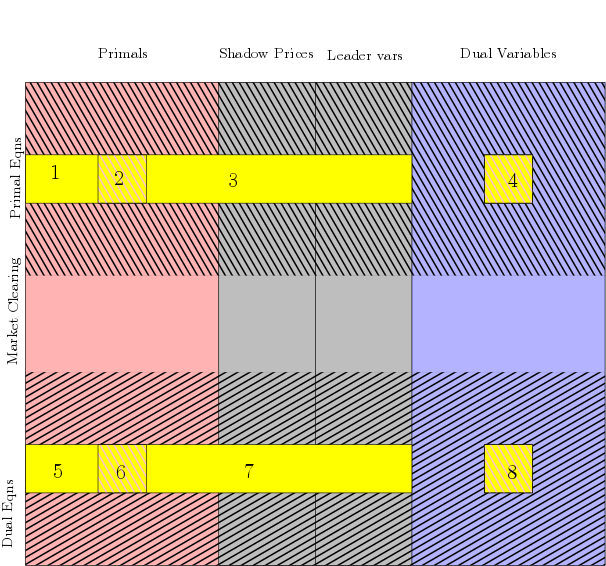
const NashGame &formulateLCP(arma::sp_mat &M, arma::vec &q, perps &Compl, VariableBounds &Bounds, bool writeToFile = false, const std::string &M_name = "dat/LCP.txt", const std::string &q_name = "dat/q.txt") const
Formulates the LCP corresponding to the Nash game. Computes the KKT conditions for each Player, calling MP_Param::KKT. Arranges them systematically to return M, q as an LCP \(0\leq q \perp Mx+q \geq 0 \). The way the variables of the players get distributed is shown in the image below.
Warning
Does not return the leader constraints. Use NashGame::rewriteLeadCons() to handle them
- Parameters
M – The output matrix M
q – The output vector q
Compl – The output complementarities pairings
OutBounds – The output Bounds on variables
writeToFile – If true, writes M and q to file.k
M_name – Filename for M
q_name – Filename for Q
- Returns
-
arma::sp_mat rewriteLeadCons() const
Rewrites leader constraint adjusting for dual variables. Rewrites leader constraints given earlier with added empty columns and spaces corresponding to Market clearing duals and other equation duals. This becomes important if the Lower level complementarity problem is passed to LCP with upper level constraints.
- Returns
The matrix with the leader constraints
-
inline arma::vec getLeadRHS() const
Gets the RHS of the Leader Constraints.
- Returns
THe LeaderConstraintsRHS object
-
inline arma::vec getMCLeadRHS() const
Gets the RHS of the Market Clearing Constraints plus the leader ones.
- Returns
THe queried object
-
std::unique_ptr<GRBModel> respond(unsigned int player, const arma::vec &x, bool fullvec = true) const
Given the decision of other players, find the optimal response for player in position
player. Given the strategy of each player, returns a Gurobi Model that has the optimal strategy of the player at positionplayer.- Parameters
player – The player id
x – A std::vector of pure strategies (either for all players or all other players)
fullvec – True if
xcontains the strategy for all players
- Returns
-
double respondSol(arma::vec &sol, unsigned int player, const arma::vec &x, bool fullvec = true) const
Returns the optimal objective value that is obtainable for the player
playergiven the decisionxof all other players. Calls Game::NashGame::respond and obtains the std::unique_ptr to GRBModel of best response by playerplayer. Then solves the model and returns the appropriate objective value.- Parameters
sol – Output optimal response
player – The input player’s id
x – A std::vector of pure strategies (either for all players or all other players)
fullvec – True if
xcontains the strategy for all players
- Returns
The optimal objective value for the player
player.
-
arma::vec computeQPObjectiveValues(const arma::vec &x, bool checkFeas = false) const
Computes players’ objective. Computes the objective value of each player in the Game::NashGame object.
- Returns
An arma::vec with the objective values.
-
bool isSolved(const arma::vec &sol, unsigned int &violPlayer, arma::vec &violSol, double tol = 1e-4) const
Checks if the Nash game is solved.
Checks if the Nash game is solved, if not provides a proof of deviation
- Parameters
sol – The std::vector of pure strategies for the Nash Game
violPlayer – Output index of the player with profitable deviation
violSol – The output pure strategy for that player - which gives a profitable deviation
tol – The deviation tolerance
-
NashGame &addDummy(unsigned int par = 0, int position = -1)
Add dummy variables (parameters) in a NashGame object. These are just zero columns that don’t feature in the problem anywhere. They are of importance only where the NashGame gets converted into an LCP and gets parametrized. Typically, they appear in the upper level objective in such a case.
- Parameters
par – Number of parameters
position – Position of the parameters
- Returns
-
NashGame &addLeadCons(const arma::vec &a, double b)
Adds Leader constraint to a NashGame object. In case common constraint to all followers is to be added (like a leader constraint in an MPEC), this function can be used. It adds a single constraint \( a^Tx \leq b\).
- Parameters
a – The constraint LHS
b – The constraint RHS
- Returns
A pointer to this
-
void write(const std::string &filename, bool append = true, bool KKT = false) const
Writes the Nash Game sum up to a file.
- Parameters
filename – The filename
append – Should the method append to the file?
KKT – True if the KKT needs to be included
-
void save(const std::string &filename, bool erase = true) const
Saves the
Game::NashGameobject in a loadable file.
-
long int load(const std::string &filename, long int pos = 0)
Loads the
Game::NashGameobject stored in a file.Loads the
NashGameobject stored in a file. Before calling this function, use the constructor NashGame::NashGame(GRBEnv *Env) to initialize. Loads theNashGameobject stored in a file. Before calling this function, use the constructor NashGame::NashGame(GRBEnv *Env) to initialize.Example usage:
int main() { GRBEnv Env; Game::NashGame N(&Env); N.load("./dat/Ndata.dat"); std::cout<<N<<'\n'; return 0; }
- Parameters
filename – The filename
pos – The start writing position
- Returns
The end position
Private Functions
-
void setPositions()
Stores the position of each players’ primal and dual variables. Also allocates Leader’s position appropriately. The ordering is according to the columns of the following image.
Private Members
-
GRBEnv *Env = nullptr
A pointer to the Gurobi Environment.
-
arma::sp_mat LeaderConstraints
Upper level leader constraints LHS.
-
arma::vec LeaderConstraintsRHS
Upper level leader constraints RHS.
-
unsigned int NumPlayers
Number of players in the Nash Game.
-
VariableBounds Bounds
BoundsX on primal variables.
-
arma::sp_mat MarketClearing
Market clearing constraints.
-
arma::vec MCRHS
RHS to the Market Clearing constraints.
-
std::vector<unsigned int> PrimalPosition
In the vector of variables of all players, which position does the variable corresponding to this player starts.
-
std::vector<unsigned int> DualPosition
In the vector of variables of all players, which position do the DUAL variable corresponding to this player starts.
-
unsigned int MC_DualPosition = {}
Manages the position of Market clearing constraints’ duals.
-
unsigned int LeaderPosition = {}
Manages the position of where the leader’s variables start.
-
unsigned int numLeaderVar
Manages the position of where the leader’s variables start. These many variables will not have a matching complementary equations.
Friends
-
inline friend std::ostream &operator<<(std::ostream &os, const NashGame &N)
-
inline explicit NashGame(GRBEnv *e) noexcept
-
class EPEC : public Game::AbstractGame<Data::EPEC::DataObject>
EPEC
-
class EPEC : public Game::AbstractGame<Data::EPEC::DataObject>
Class to handle a Nash game between leaders of Stackelberg games.
Subclassed by Models::EPEC::EPEC
Public Functions
-
inline EPEC(GRBEnv *env)
The standard constructor. Initialize an empty instance.
- Parameters
env – The Gurobi environment pointer.
-
void finalize()
Finalizes the creation of a Game::EPEC object.
Performs a bunch of job after all data for a Game::EPEC object are given, namely. Models::EPEC::computeLeaderLocations - Adds the required dummy variables to each leader’s problem so that a game among the leaders can be defined. Calls Game::EPEC::addDummyLead
Makes the market clearing constraint in each country. Calls
-
virtual void findNashEq() override
Computes Nash equilibrium using the Algorithm set in Game::EPEC::Algorithm. Checks the value of Game::EPEC::Algorithm and delegates the task to appropriate Algorithm wrappers.
-
virtual bool isSolved(double tol = 1e-5) const override
Call the delegated Algorithm method and return true if there exist a feasible equilibrium.
- Parameters
tol – A numerical tolerance
- Returns
True if the incumbent solution is an equilibrium
-
virtual bool isPureStrategy(double tol = 1e-5) const override
Call the delegated Algorithm method and return true if the equilibrium is pure.
- Parameters
tol – A numerical tolerance
- Returns
True if the incumbent equilibrium is pure
-
std::unique_ptr<GRBModel> bestResponseProgram(const unsigned int i, const arma::vec &x, MathOpt::PolyLCP *customLCP = nullptr) const
Given a player id
i, the incumbent solutionx(and optionally a custom player LCPcustomLCP), this method returns the model corresponding to the best response ofigiven the other players’ decisions inx.- Parameters
i – The player id
x – The incumbent solution
customLCP – An optional parameter with a custom LCP
- Returns
A pointer to the (solved) Gurobi model for the best response
-
double bestResponse(arma::vec &sol, unsigned int player, const arma::vec &x, const arma::vec &prevDev = {}, MathOpt::PolyLCP *customLCP = nullptr) const
Returns the best-response value for the player
playergiven the decisionxof all other players.Calls Game::EPEC::respond and obtains the std::unique_ptr to GRBModel of best response by player
player. Then solves the model and returns the appropriate objective value.- Parameters
sol – The optimal response for
playerplayer – The player id
x – The solution vector
prevDev – An optional previous deviation encountered. This is useful to normalize any unbounded best response
customLCP – An optional pointer to a custom player LCP.
- Returns
The optimal objective value for the player
player.
-
inline const arma::vec getX() const
Getter for the incumbent solution (x)
- Returns
The incumbent x
-
inline const arma::vec getZ() const
Getter for the incumbent solution (z)
- Returns
The incumbent z
-
void setAlgorithm(Data::EPEC::Algorithms algorithm)
Decides the Algorithm to be used for solving the given instance of the problem. The choice of algorithms are documented in Game::EPECalgorithm.
- Parameters
algorithm – The input algorithm
-
void setRecoverStrategy(Data::EPEC::RecoverStrategy strategy)
Decides the Algorithm to be used for recovering a PNE out of the InnerApproximation procedure.
- Parameters
strategy – Input ecovery strategy
-
void setBranchingStrategy(Data::EPEC::BranchingStrategy strategy)
Sets the branching strategy for the CutAndPlay.
- Parameters
strategy – The input strategy
-
inline void setAggressiveness(unsigned int a)
-
inline void setAddPolyMethod(Data::LCP::PolyhedraStrategy add)
Set the Data::LCP::PolyhedraStrategy for the inner approximation.
-
unsigned int getPositionLeadFoll(unsigned int i, unsigned int j) const
Gets the position of the j-th variable in the i-th leader Querying Game::EPEC::LCPModel for x[return-value] variable gives the appropriate variable.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
unsigned int getPositionLeadLead(unsigned int i, unsigned int j) const
Gets the position of the j-th Follower variable in the i-th leader Querying Game::EPEC::LCPModel for x[return-value] variable gives the appropriate variable.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
double getValLeadFoll(unsigned int i, unsigned int j) const
Gets the value of the j-th variable in i-th leader.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
double getValLeadLead(unsigned int i, unsigned int j) const
Gets the value of the j-th non-follower variable in i-th leader.
- Parameters
i – Leader number
j – Follower number
- Returns
The queried position
-
double getValProbab(unsigned int i, unsigned int k)
Returns the probability associated with the k -th polyhedron of the i -th leader.
- Parameters
i – Leader index
k – The polyhedron index
- Returns
The queried attribute
-
double getValLeadFollPoly(unsigned int i, unsigned int j, unsigned int k, double tol = 1e-5) const
For the
i-th leader, gets thek-th pure strategy at positionj.- Parameters
i – The leader index
j – The position index
k – The pure strategy index
tol – A numerical tolerance
- Returns
The queried attribute
-
double getValLeadLeadPoly(unsigned int i, unsigned int j, unsigned int k, double tol = 1e-5) const
For the
i-th leader, gets thek-th pure strategy at leader positionj.- Parameters
i – The leader index
j – The position index
k – The pure strategy index
tol – A numerical tolerance
- Returns
The queried attribute
-
std::vector<unsigned int> mixedStrategyPoly(unsigned int i, double tol = 1e-5) const
Returns the indices of polyhedra feasible for the leader, from which strategies are played with probability greater than the tolerance.
- Parameters
i – Leader index
tol – Tolerance
- Returns
The queried attribute
-
inline const MathOpt::LCP &getLCPDescription() const
Get the Game::LCP object solved in the last iteration either to solve the problem or to prove non-existence of Nash equilibrium. Object is returned using constant reference.
-
inline const GRBModel &getLCPModel() const
Get the GRBModel solved in the last iteration to solve the problem or to prove non-existence of Nash equilibrium. Object is returned using constant reference.
-
inline void writeLCPModel(const std::string &filename) const
Writes the GRBModel solved in the last iteration to solve the problem or to prove non-existence of Nash equilibrium to a file.
-
void getXWithoutHull(const arma::vec &x, arma::vec &xWithoutHull) const
Given the the solution
x, the method returns inxWithoutHullthe x vector without the convex-hull’s variables. Also, no MC variables are included.- Parameters
x – The EPEC’s solution
xWithoutHull – The output solution without convex hull variables
-
void getXofI(const arma::vec &x, const unsigned int &i, arma::vec &xOfI, bool hull = false) const
Given the player id
iand the solutionx, the method returns inxWithoutHullthe x vector for the given player, with the convex-hull’s variables in casehullis false. Also, no MC variables are included.- Parameters
x – The EPEC’s solution
i – The player id
xOfI – Output solution vector for i
hull – True if convex-hull variables need to be included in the output
-
void setWelfareObjective(bool linear, bool quadratic)
Given the object Game::EPEC::LCPModel, this method sets its objective to the social welfare. In specific, we can decide whether to include or not the linear or quadratic part of the welfare
- Parameters
linear – True if the linear part is to be included, false otherwise.
quadratic – True if the quadratic part is to be included, false otherwise.
Protected Functions
-
bool warmstart(const arma::vec &x)
Warmstarts EPEC with a solution.
Warmstart the solution with
x.- Todo:
Complete this implementation
- Parameters
x – The warmstart solution
- Returns
True if the warmstart was successful
-
virtual void makeObjectivePlayer(const unsigned int i, MathOpt::QP_Objective &QP_obj) = 0
Empty function - optionally re-implementable in derived class.
- Parameters
i – The player id
QP_obj – The QP_object with the objective
-
virtual void preFinalize() = 0
Empty function - optionally re-implementable in derived class.
This function can be optionally implemented by the derived class. Code in this class will be run before calling Game::EPEC::finalize().
-
virtual void postFinalize() = 0
Empty function - optionally re-implementable in derived class.
This function can be optionally implemented by the derived class. Code in this class will be run after calling Game::EPEC::finalize().
-
virtual void updateLocations() = 0
Empty function - optionally re-implementable in derived class.
If any location tracking system is implemented, that can be called from in here.
-
inline virtual void makeMCConstraints(arma::sp_mat &MC, arma::vec &RHS) const
Empty function - optionally re-implementable in derived class.
Builds the Market Clearing constraints
- Parameters
MC – MC constraints matrix
RHS – RHS for the constraints
Protected Attributes
-
std::vector<std::shared_ptr<Game::NashGame>> PlayersLowerLevels = {}
The lower level Nash Games among the followers.
-
std::vector<std::shared_ptr<MathOpt::LCP>> PlayersLCP = {}
The LCP of each leader, encompassing both Stackelberg and low-level Nash games.
-
std::vector<std::shared_ptr<MathOpt::QP_Objective>> LeaderObjective = {}
Objective of each leader.
-
std::vector<std::shared_ptr<MathOpt::QP_Objective>> LeaderObjectiveConvexHull = {}
Objective of each leader, given the convex hull computation.
-
std::vector<unsigned int> LeaderLocations = {}
Location of each leader Number of variables in the current player, including any number of convex hull variables at the current moment. The used, i.e., the inheritor of Game::EPEC has the responsibility to keep this correct by implementing an override of Game::EPEC::updateLocations.
-
std::vector<const unsigned int*> LocEnds = {}
The ending locations for the leaders’ variables.
-
std::vector<unsigned int> ConvexHullVariables = {}
Number of convex hull variables for each leader.
-
unsigned int numMCVariables = {0}
Number of market clearning variables.
-
bool Finalized = {false}
A flag controlling if the EPEC was finalized.
-
arma::vec SolutionZ
Solution equation values.
-
arma::vec SolutionX
Solution variable values.
Private Functions
-
void addDummyLead(unsigned int i)
Add Dummy variables for the leaders.
Adds dummy variables to the leader of an EPEC - useful after computing the convex hull.
- Parameters
i – The leader id to whom dummy variables should be added
-
void makePlayerQP(unsigned int i)
Makes the MathOpt::QP_Param corresponding to the
i-thcountry.First gets the Game::LCP object from
Game::EPEC::PlayersLowerLevelsand makes a MathOpt::QP_Param with this LCP as the lower levelThis is achieved by calling LCP::makeQP and using the objective value object in
Game::EPEC::LeaderObjectiveFinally the locations are updated owing to the complete convex hull calculated during the call to LCP::makeQP
Note
Overloaded as Models::EPEC::makePlayerQP()
- Parameters
i – The player’s id
-
void makePlayersQPs()
Makes the MathOpt::QP_Param for all the countries. Calls are made to Models::EPEC::makePlayerQP(const unsigned int i) for each valid player id.
-
void makeTheLCP()
Formulates the LCP to compute an equilibrium. In this LCP, each player’s feasible region is given by the PlayersQP associated entry. If the QP stems from a full enumeration, for instance, the solution will be exact.
-
void computeLeaderLocations(unsigned int addSpaceForMC = 0)
Assigns the values to LeaderLocations to each player.
- Parameters
addSpaceForMC – contains the number of Market Clearing variables
-
void getXMinusI(const arma::vec &x, const unsigned int &i, arma::vec &xMinusI) const
Given a solution in
x, computes the other players’ solution x minusiinxMinusI.- Parameters
x – The incumbent solution
i – The player id
xMinusI – The output strategy
-
bool computeNashEq(bool pureNE, double localTimeLimit, bool check, bool linearWelfare, bool quadraticWelfare)
Given that Game::EPEC::PlayersQP are all filled with a each country’s MathOpt::QP_Param problem (either exact or approximate), computes the Nash equilibrium.
pureNEchecks for pure Nash Equilibrium. It does not work with EPEC::Algorithms::CutAndPlaylocalTimeLimitsets the timelimit for the solver. a negative value is infinite timecheckIf true, the method calls the isSolved() method related to the active algorithm EPEC::AlgorithmslinearWelfareIf true, the objective of the resulting LCP includes the sum of the linear objectives for the playersquadraticWelfareIf true, the objective of the resulting LCP includes the sum of the quadratic objectives for the players- Returns
true if a Nash equilibrium is found
Private Members
-
std::shared_ptr<Algorithms::EPEC::PolyBase> Algorithm = {}
The incumbent algorithm used to solve the instance.
-
std::vector<unsigned int> SizesWithoutHull = {}
Size of leaders’ variables without the convex hull variables.
-
std::unique_ptr<GRBModel> LCPModel
A Gurobi mode object of the LCP form of EPEC.
-
std::unique_ptr<GRBModel> LCPModelBase
A Gurobi mode object of the LCP form of EPEC. If we are searching for a pure NE, the LCP which is indifferent to pure or mixed NE is stored in this object.
Friends
- friend class Algorithms::EPEC::PolyBase
- friend class Algorithms::EPEC::InnerApproximation
- friend class Algorithms::EPEC::CutAndPlay
- friend class Algorithms::EPEC::CombinatorialPNE
- friend class Algorithms::EPEC::FullEnumeration
-
inline EPEC(GRBEnv *env)
IPG
-
class IPG : public Game::AbstractGame<Data::IPG::DataObject>
This class handles Integer Programming Games (IPG), namely multiple agents solving an integer programming game.
Subclassed by Models::IPG::IPG
Public Functions
-
void finalize()
This methods finalizes the model by disabling any edits to the number of players. The proper object (for instance, the ones counting players variables) are initialized with the right values.
-
inline IPG(GRBEnv *env)
Standard initializer.
- Parameters
env – A pointer to the Gurobi Environment
-
IPG(GRBEnv *env, std::vector<std::shared_ptr<MathOpt::IP_Param>> players)
This constructors initializes the integer programming game with the Gurobi environment
envand the vector of shared pointers to the IP_Params inplayers.- Parameters
env – A pointer to the Gurobi Environment
players – A vector containing the pointers to the IP param for each player
env – Pointer to the Gurobi environment
players – The MathOpt::IP_Param for the players
-
virtual void findNashEq() override
The main method to start the solving process.
-
virtual bool isSolved(double tol = 1e-5) const override
Return a bool true if the strategies are all pure, for any player.
-
virtual bool isPureStrategy(double tol = 1e-5) const override
Return a bool indicating whether the equilibrium is a pure strategy.
-
inline std::vector<arma::vec> getX() const
Gets the X in the incumbent solution.
- Returns
A const vector copy of X.
-
inline double getSocialWelfare() const
-
inline ZEROStatistics<Data::IPG::DataObject> getStatistics() const
Get the EPECStatistics object for the current instance.
-
inline void setAlgorithm(Data::IPG::Algorithms algorithm)
Sets the Data::IPG::Algorithms for the solution process.
- Parameters
algorithm – An enum from Data::IPG::Algorithms
-
inline void setPresolve(bool value)
Sets the Data::IPG::Presolve for the solution process.
- Parameters
value – A boolean for Data::IPG::Presolve
-
inline void setLCPAlgorithm(const Data::LCP::Algorithms algo)
Sets the Data::LCP::Algorithms for the LCP solution process.
- Parameters
algo – An enum from Data::LCP::Algorithms
-
inline void setGameObjective(const Data::IPG::Objectives obj)
Sets the Data::IPG::Objectives for the LCP objective.
- Parameters
obj – An enum from Data::IPG::Objectives
-
inline void setCutsAggressiveness(const Data::IPG::CutsAggressiveness aggressiveness)
Sets the Data::IPG::CutsAggressiveness for the cut aggressiveness in Algorithms::IPG::CutAndPlay.
- Parameters
aggressiveness – An enum from Data::IPG::CutsAggressiveness
Protected Functions
-
virtual void preFinalize() = 0
Virtual (empty) method. Can be implemented by a derived class.
-
virtual void postFinalize() = 0
Virtual (empty) method. Can be implemented by a derived class.
Protected Attributes
-
std::vector<std::shared_ptr<MathOpt::IP_Param>> PlayersIP = {}
The Integer Programs associated to each player.
-
std::vector<unsigned int> PlayerVariables = {}
The number of variables for each player.
-
bool Finalized = {false}
-
std::vector<arma::vec> Solution
Solution variable values, for each player.
-
double SocialWelfare
SocialWelfare associated to the incumbent solution.
Private Members
-
std::shared_ptr<Algorithms::IPG::Algorithm> Algorithm = {}
The Algorithm’s instance.
Friends
- friend class Algorithms::IPG::Algorithm
- friend class Algorithms::IPG::CutAndPlay
- friend class Algorithms::IPG::ZERORegrets
-
void finalize()